L'azienda propone un servizio di rilevo delle infrastrutture stradali con l’ausilio di soluzioni pratiche e ad alta precisione.
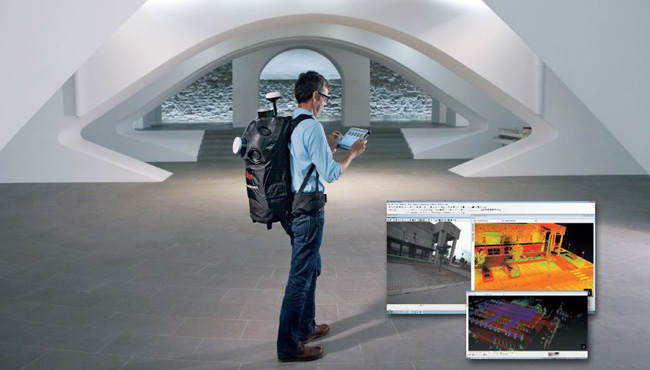
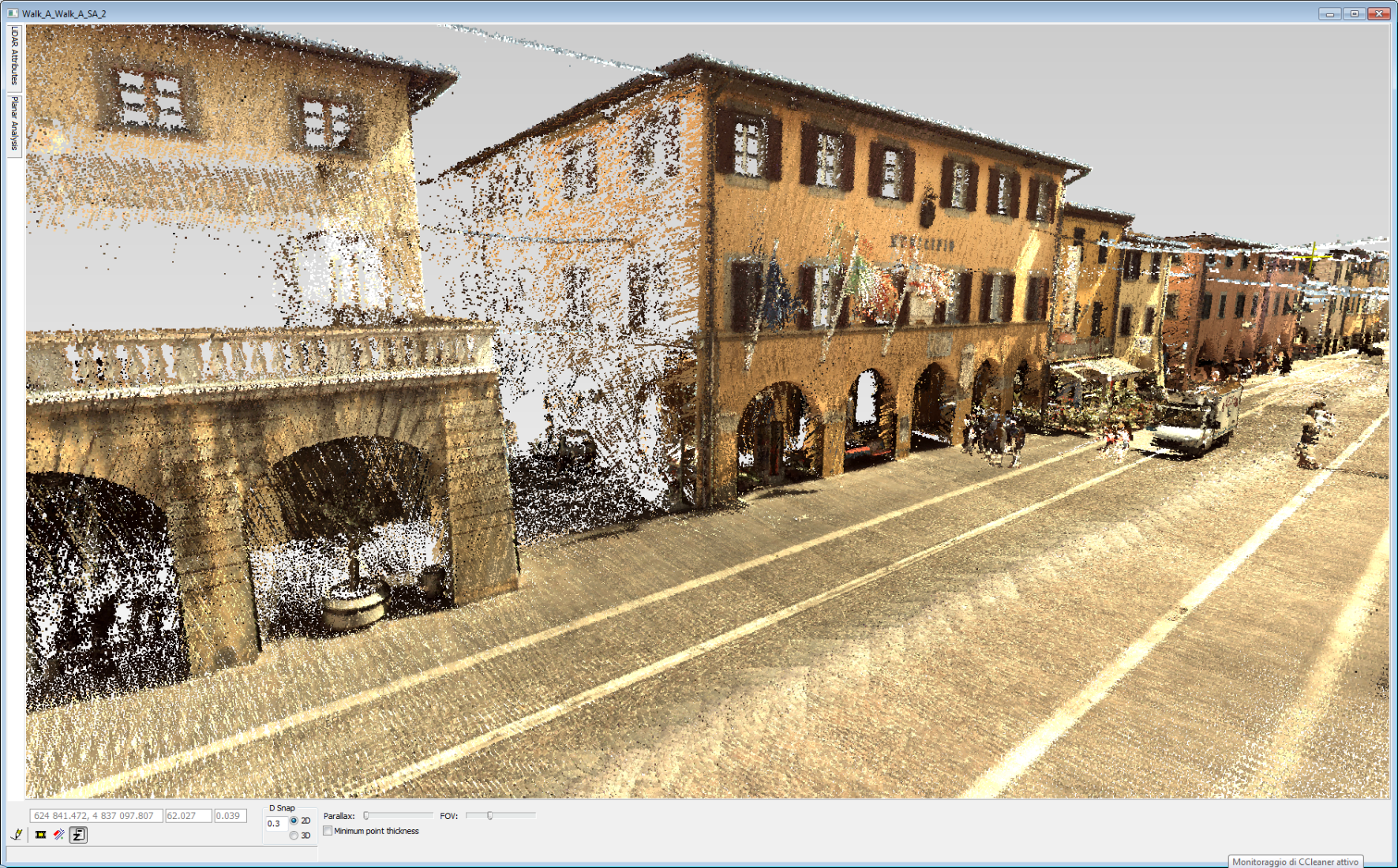
Pegasus - BackPack è il pluripremiato sensore real-capture indossabile che combina telecamere ad alta risoluzione e profiler LiDAR, con la leggerezza di un telaio in fibra di carbonio in un design altamente ergonomico. Questa soluzione mobile mapping permette una mappatura interna o esterna con qualità professionale. Pegasus - BackPack esegue scansioni progressive in modo semplice e veloce; la tecnologia è completamente portatile e facilmente trasportabile. Pegasus - BackPack è dotato di:
2 profilometri da 600'000 punti/secondo, 50 metri di range utilizzabile, 16 canali,
5 camere con vista a 360° con risoluzione a 4 Mega-pixel (2,7 immagini/secondo)
NovAtel OEM 638 GNSS (tripla banda, banda L, SBAS e QZSS costellazioni per il GPS, GLONASS, Galileo e Beidou)
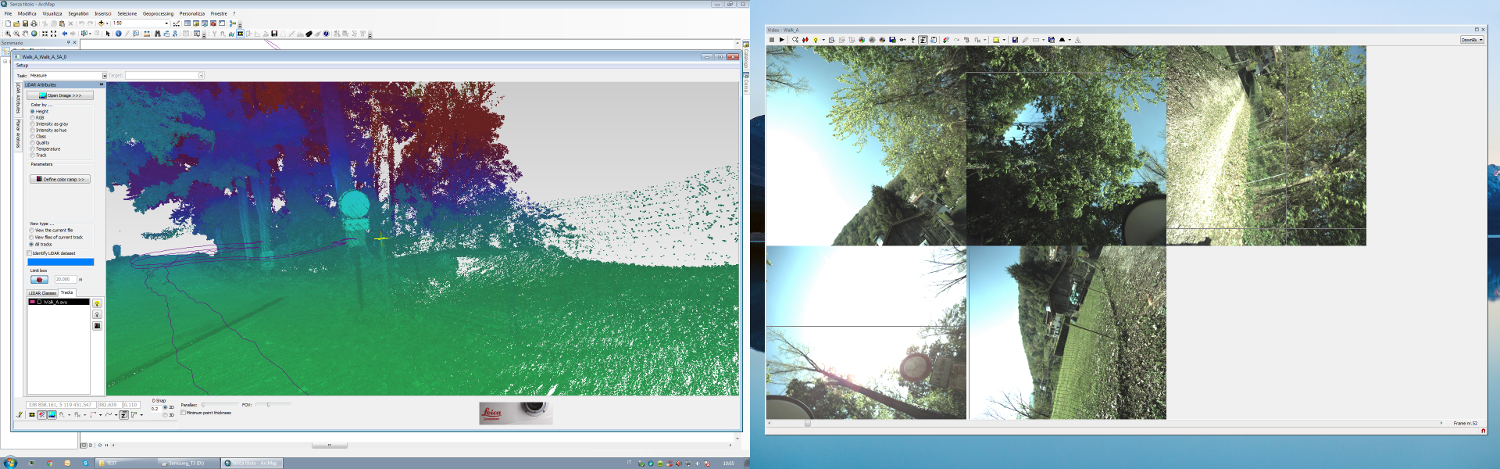
Il funzionamento di GNSS + IMU + bussola + SLAM (Smoothed Best Estimated Trajectory) garantisce il calcolo della traiettoria sia all'interno che all'esterno.
Il sistema è compatibile con ESRI ArcGIS / ArcMap Desktop.
Il sistema Pegasus - BackPack è IP52.
Il rilievo utilizza in post-processing dati RINEX provenienti da reti GNSS o da stazioni GPS per la correzione del dato finale.
Pegasus - BackPack è il pluripremiato sensore real-capture indossabile che combina telecamere ad alta risoluzione e profiler LiDAR, con la leggerezza di un telaio in fibra di carbonio in un design altamente ergonomico. Questa soluzione mobile mapping permette una mappatura interna o esterna con qualità professionale. Pegasus - BackPack esegue scansioni progressive in modo semplice e veloce; la tecnologia è completamente portatile e facilmente trasportabile. Pegasus - BackPack è dotato di:
2 profilometri da 600'000 punti/secondo, 50 metri di range utilizzabile, 16 canali,
5 camere con vista a 360° con risoluzione a 4 Mega-pixel (2,7 immagini/secondo)
NovAtel OEM 638 GNSS (tripla banda, banda L, SBAS e QZSS costellazioni per il GPS, GLONASS, Galileo e Beidou)
Il funzionamento di GNSS + IMU + bussola + SLAM (Smoothed Best Estimated Trajectory) garantisce il calcolo della traiettoria sia all'interno che all'esterno.
Il sistema è compatibile con ESRI ArcGIS / ArcMap Desktop.
Il sistema Pegasus - BackPack è IP52.
Il rilievo utilizza in post-processing dati RINEX provenienti da reti GNSS o da stazioni GPS per la correzione del dato finale.
Box-Video: strumento per l’acquisizione di immagini georiferite dotato di 4 videocamere HD e GPS a doppia frequenza integrato
Mini-Box: strumento dotato di una videocamera HD e GPS a doppia frequenza integrato per il rilievo speditivo delle strade, particolarmente indicato per rilievi in ambienti difficili.
I sistemi di acquisizione immagini (Box-Video e Mini-Box) sono sincronizzati con il sistema di navigazione ed è quindi possibile conoscere per ogni fotogramma la posizione e l’assetto della fotocamera al momento dello scatto.
In particolare il Box-Video, utilizzando anche le due videocamere laterali consente di avere, assieme a quella frontale, una panoramica più ampia della zona di ripresa consentendo una valutazione dello stato di fatto degli oggetti ripresi. La videocamera sul retro del veicolo è orientata a filmare il manto stradale.
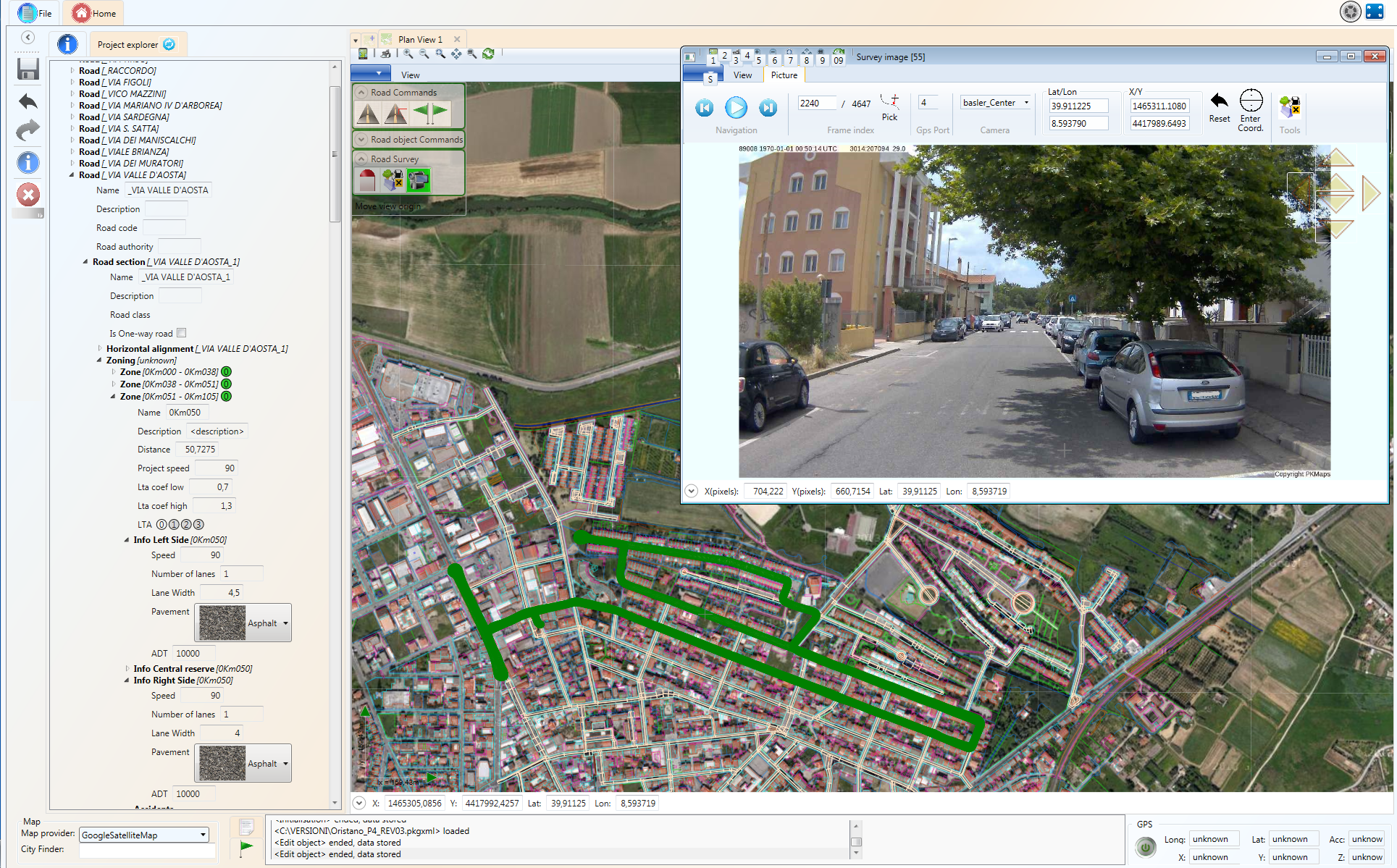
I dati rilevati con il Box-Video e Mini-Box possono essere visualizzati in modo rapido con Survey Viewer oppure possono essere elaborati, implementati e gestiti attraverso il software PK BIM
Survey Viewer: sviluppato in Java, ha la possibilità di visualizzare tutte le videocamere utilizzate e di caricare una ortofoto come cartografia di riferimento, visualizzando in una finestra separata la posizione della videocamera istante per istante.
PKBIM: la visualizzazione su PKBIM dei fotogrammi georiferiti consente l’implementazione della base dati. Grazie al rilievo e alla successiva fase di post-processing dei dati, siamo in grado di localizzare ed inserire in PKBIM tutte le informazioni degli oggetti rilevati, ottenendo come risultato finale un rilievo dello stato di fatto dell’infrastruttura stradale.